ABSTRACT: In this post we are discussing the similarities of graphs and images. We will start with matrix and spacial representations to show how graphs and images differs and resembles. Then we will dive into the applications from traditional signal processing to neural networks. Finally we take 3D vision as the bridging of image and graph in computer vision tasks.
Draft structure:
- Basics (Spacial representation)
- Matrix representation of graph
Non-Euclid properties of graph
- Matrix representation of image
Euclid properties of images
- Image is special graph
- From group theory's perspective
- Matrix representation of graph
- Applications
- Signal and systems review, but 2d
- Frequency domain of graph and img
Sampling, filtering and convolution of graphs and images.
- CNN & GNN (Local receptive fields in CNNs vs. neighborhood aggregation in GNNs)
- Graph transformers & ViT
- Signal and systems review, but 2d
- Combinational application
- PointNet Series
Draft end.
Spacial Representations
Graphs
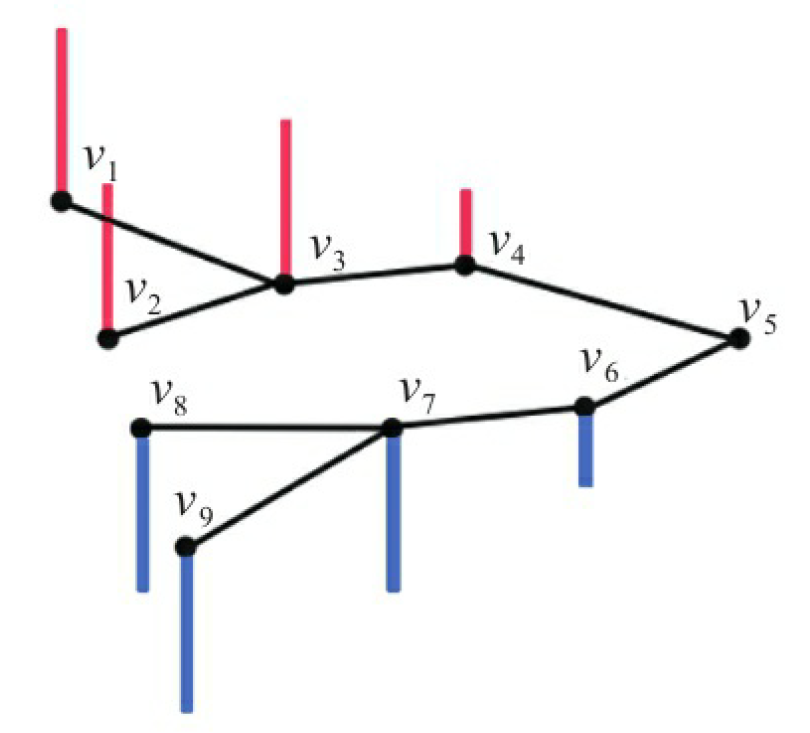
A graph
DEFINITION. Each element of laplacian matrix is defined as:
DEFINITION. Symmetric normalized laplacian
is given as:
The non-Euclid properties of Graphs
THEOREM. A graph if and only if it can be embedded on the surface of a sphere.
@TODO laplacian matrix & laplacian operator
References
Daigavane, A., Ravindran, B., & Aggarwal, G. (2021). Understanding convolutions on graphs. Distill.
Ortega, A. (2022). Introduction to graph signal processing. Cambridge University Press.
Gonzales, R. C., & Wintz, P. (1987). Digital image processing. Addison-Wesley Longman Publishing Co., Inc..
Wilson, R. J. (2015). Introduction to Graph Theory uPDF eBook. Pearson Higher Ed.