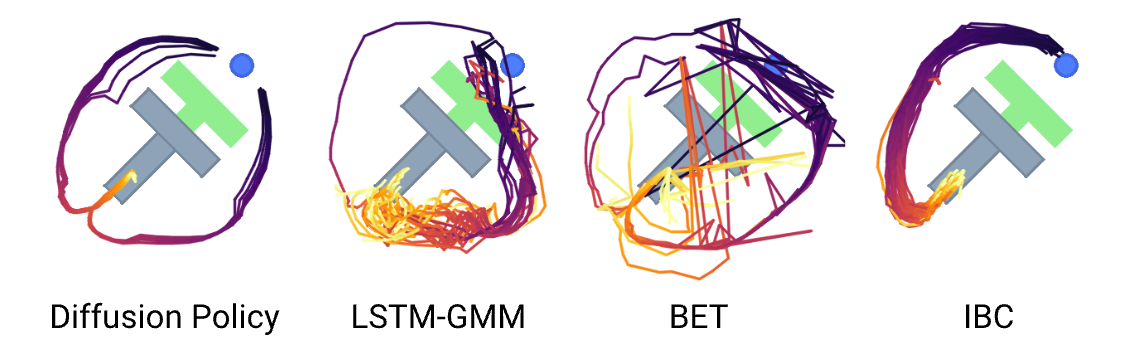
In short, using diffusion process instead of directly applying MSE loss on trajectories enables a wider variety of trajectory solutions learnt from imitation data, instead of the trajectory provided by dataset(s), which is beneficial for small-set imitation learning. In this blog post, we will discuss how and why diffusion process can achieve such and trajectory-agnostic result.
This is one part of the series about energy-based learning and optimal control. A recommended reading order is:
- Notes on “The Energy-Based Learning Model” by Yann LeCun, 2021
- Learning Data Distribution Via Gradient Estimation
- From MPC to Energy-Based Policy
- How Would Diffusion Model Help Robot Imitation
- Causality hidden in EBM
Diffusion Process Revisiting

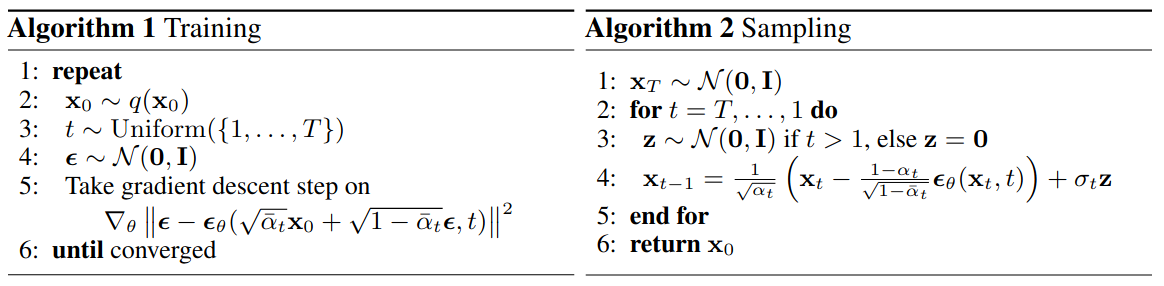
We can start from the target functions of DDPM. The forward process, where noise are added to samples, is formulated as
where , schedules the noise level. This can be inferred from based on its markov chain property. The optimization target of network is formulated as predicting the noise added in the forward process at different noise levels. For example, , where denotes noise generated with noise level .
And if we want to add condition for the model, we can simply use these conditions with cross attention on noise predictors.
Paradigm: Learning Distribution by Estimating Gradients
It’s easy for researchers to come out the idea that the conditional observation-action distribution can also be learned by estimation gradients of data distribution, which is a common paradigm of RL and IL.
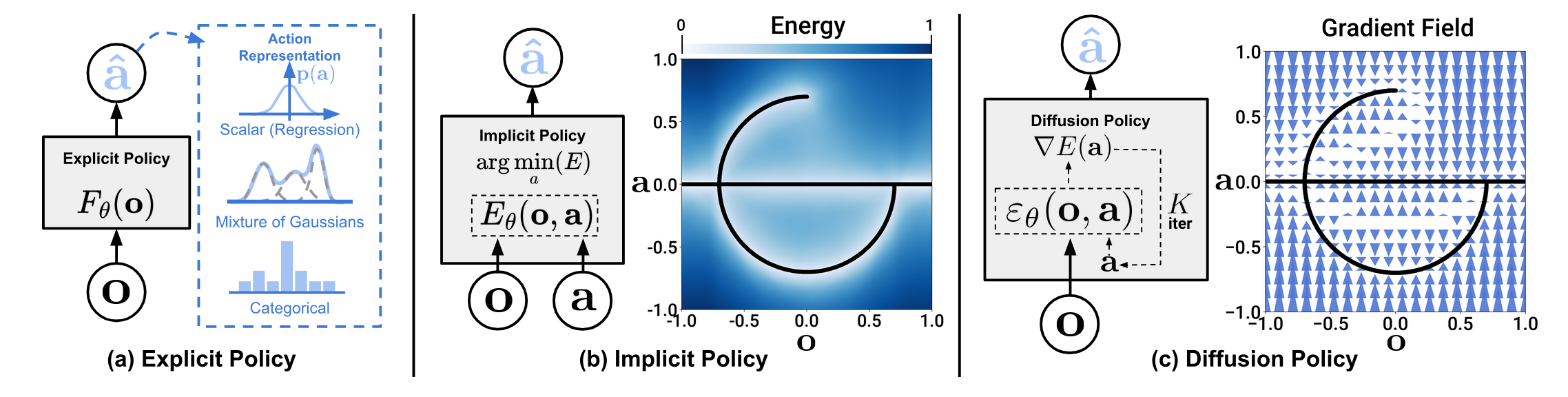
Implicit Policy Learning
Score-Based Generative Modeling through Stochastic Differential Equations states that, for score matching, it’s reversing a “variance exploding” SDE where more and more noise is added to data, while diffusion models are reversing a “variance preserving” SDE that interpolates between the data and a fixed variance gaussian.
Stochastic Sampling and Initialization
Intuitively, multi-modality in action generation for diffusion policy arises from two sources – an underlying stochastic sampling procedure and a stochastic initialization.
Trajectory Generation with Diffusion Models
People have been dreaming of using video or scene generation model as “world model” to guide robot planning. However, most of the information in a video frame, even for those captured in real scenarios are highly redundant for the oriented task.
In need of a unified representation of states and actions among different training sets, especially visual training sets like Internet videos, trajectory, as a time-dependent elegant modal, is adopted by multiple works, its generation with diffusion is also a low-hanging fruit.
Flow as the Cross-domain Manipulation Interface https://arxiv.org/abs/2407.15208